笛卡爾坐標機器人的中英文名稱解釋
引言:笛卡爾坐標機器人的英文全稱是Cartesian coordinate robot,它經過中文翻譯之后就是直角坐標機器人。然而由于功能及使用上的不同,又將直角坐標機器人進行了細分。本文將帶你了解與笛卡爾坐標機器人相關的一些中英文名稱的含義。
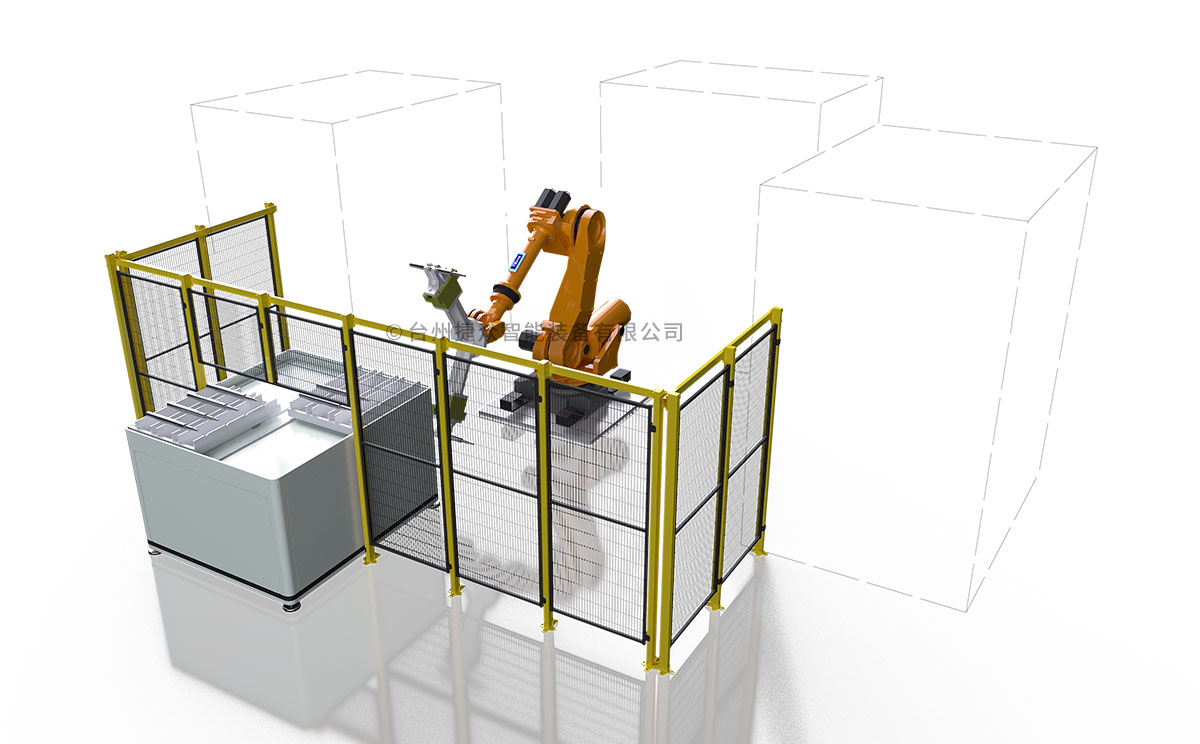
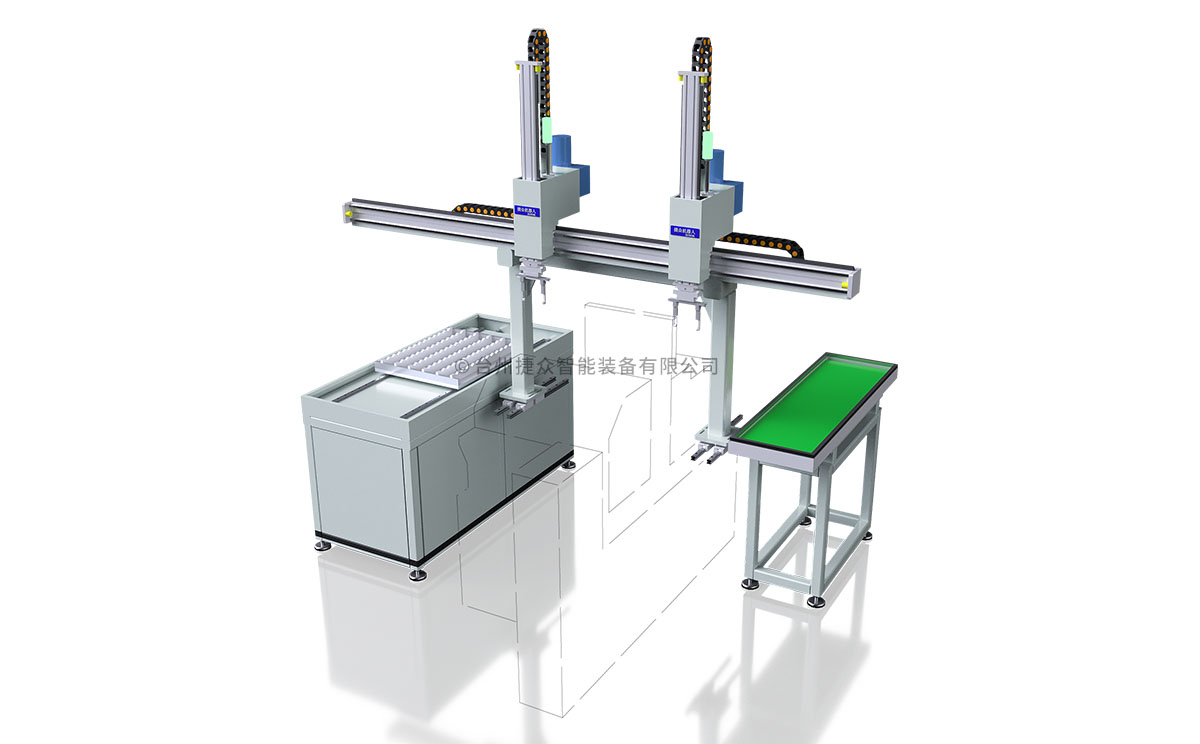
笛卡爾機器人或線性機器人都可以統稱為工業機器人,其中三個控制軸(XYZ軸)沿直線移動而不是旋轉。同時,它們的控制軸(XYZ軸)彼此成90°角,三個滑動關節可上下,左右,前后線性移動。因此,有時候會將笛卡爾機器人稱為線性機器人。
線性機器人(Linear robot)
由于笛卡爾機器人的三個滑動關節可上下,左右,前后線性移動,故有線性機器人之稱。
笛卡爾機器人控制臂解決方案通常用于CNC加工,3D打印以及銑床和繪圖機。取放機器還可以在線性的笛卡爾坐標機器人上運行。其中有一種笛卡爾機器人是龍門機器人,它的水平方向上的兩端都被支撐。
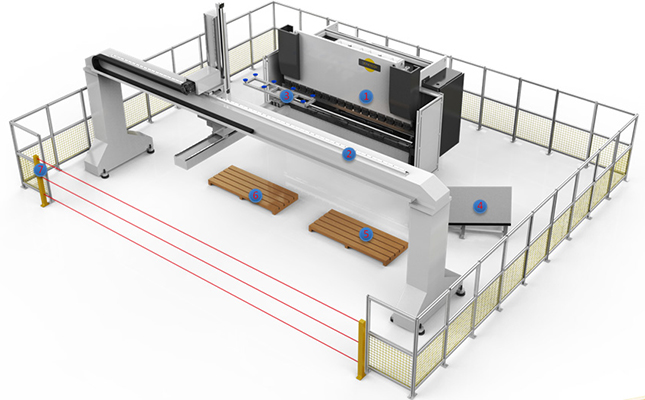
龍門機器人(Gantry robot)
龍門機器人是笛卡爾機器人的其中一種,是由于在使用功能上需要將它水平方向上的兩端都被支撐,于是就有了一種龍門的形狀,故被稱之為龍門機器人,如下圖中②即為水平方向上的兩端支撐起來的龍門。
綜上,無論是線性機器人還是龍門機器人,其實都是笛卡爾坐標機器人的一種別稱。下面,我們來進一步了解一下笛卡爾坐標機器人,也就是中文翻譯后的直角坐標機器人。
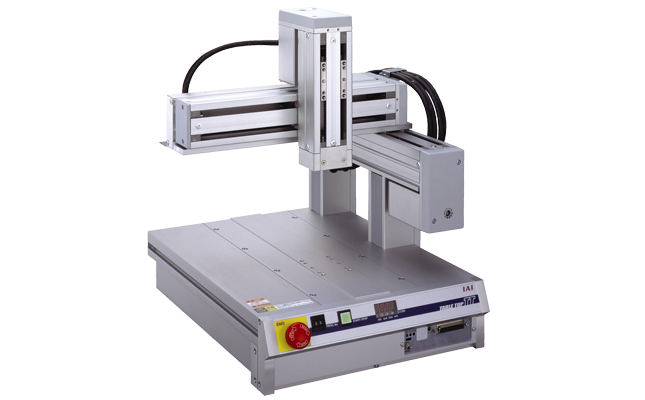
笛卡爾機器人(Cartesian robot)
笛卡爾坐標系(Cartesian coordinates)就是直角坐標系和斜坐標系的統稱。相交于原點的兩條數軸,構成了平面放射坐標系。如兩條數軸上的度量單位相等,則稱此放射坐標系為笛卡爾坐標系。兩條數軸互相垂直的笛卡爾坐標系,稱為笛卡爾直角坐標系,否則稱為笛卡爾斜角坐標系。而笛卡爾機器人指的就是笛卡爾坐標機器人。
直角坐標機器人(Cartesian coordinate robot)
直角坐標機器人是指能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系的、多用途的操作機。又稱大型的直角坐標機器人,也稱桁架機器人或龍門機器人,其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動來進行的。
桁架機器人(Gantry robot)
桁架機器人是一種建立在直角X,Y,Z三坐標系統基礎上,對工件進行工位調整,或實現工件的軌跡運動等功能的全自動工業設備。其實桁架機器人的名稱就是來自龍門機器人,因為龍門很多時候會被稱為龍門架,而龍門架又可以稱為桁架,所以就有了桁架機器人的說法。
綜上,桁架機器人、龍門機器人、線性機器人的工作原理是相同的,都是笛卡爾機器人的一種,而笛卡爾坐標機器人(Cartesian coordinate robot)經過中文翻譯之后就是直角坐標機器人。到此,相信在看完我們這篇文章之后,大家在直角坐標機器人上的一些名稱困惑,應該能得到解答了吧。