關于機器人的資料,了解更多機器人技術
引言:本文主要介紹關于機器人的資料,包括機器人的控制方法,以及機器人在不同操作環境下的分類。機器人技術日益壯大的今天,我們應該更多地去了解關于機器人的資料。
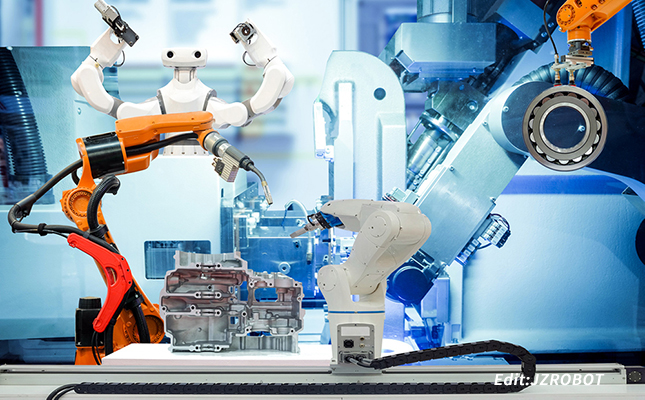
機器人技術,設計,構造以及使用機器(機器人)來執行人類傳統上完成的任務。機器人廣泛用于汽車制造等行業中,以執行簡單的重復性任務,以及必須在對人體有害的環境中進行工作的行業。
機器人技術的許多方面都涉及人工智能;機器人可能具備與人類相同的感覺,例如視覺,觸覺和感測溫度的能力。有些甚至可以進行簡單的決策,并且當前的機器人技術研究旨在設計具有一定程度自給自足的機器人,這將允許在非結構化環境中進行移動和決策。
按操作環境對機器人進行分類
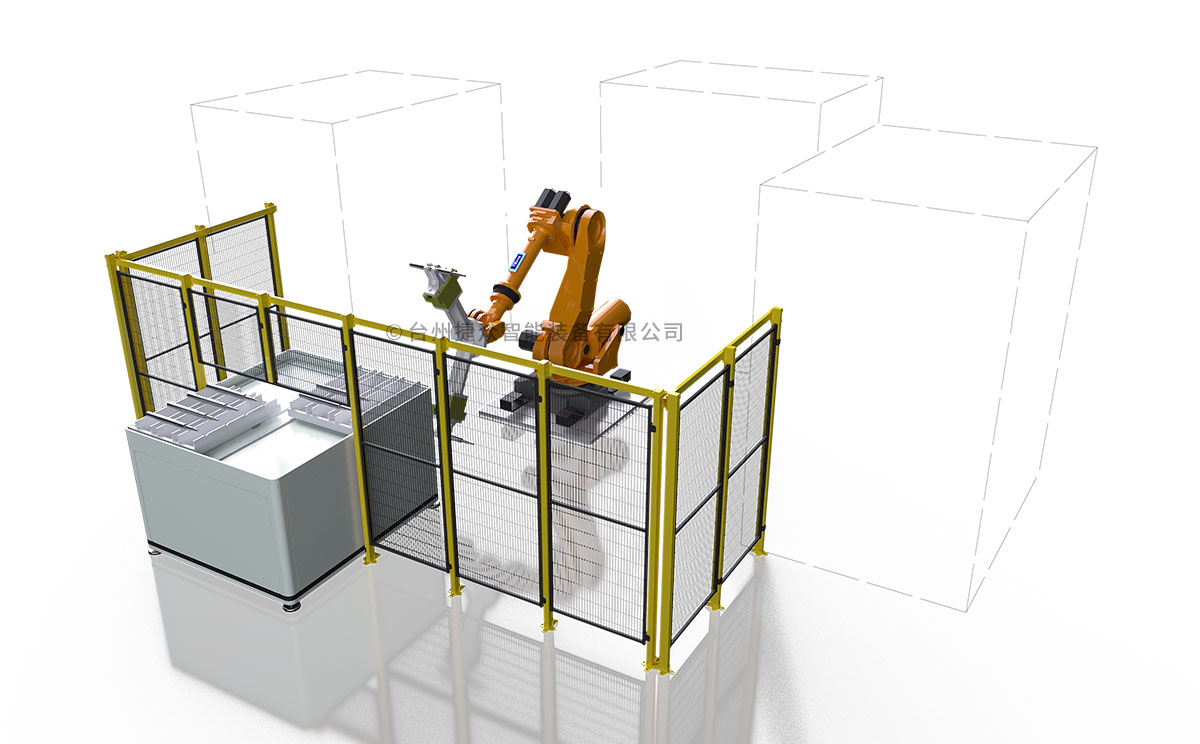
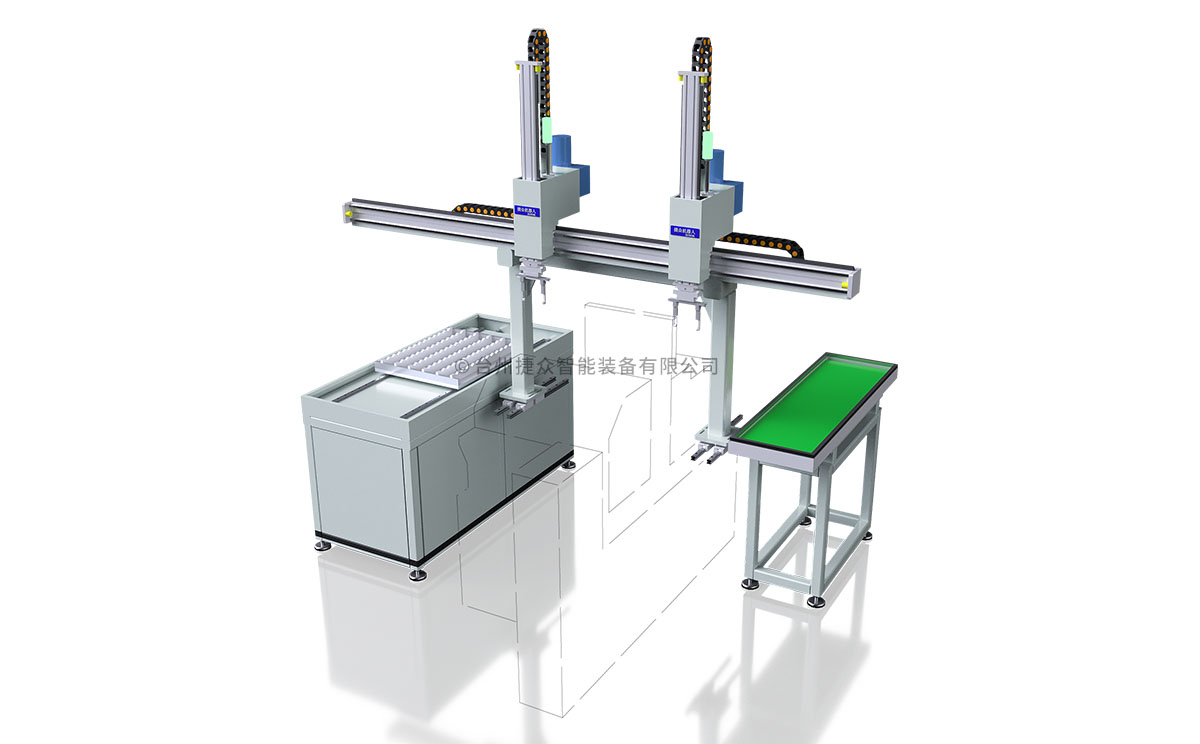
1、固定式機器人:可以將機器人手臂,計算機化的機床以及固定在一個地方的大多數其他工業機器人歸為此類。工業機器人常用的配置是:關節式機器人手臂,圓柱坐標機器人手臂,SCARA機器人手臂和直角坐標機器人手臂。
2、地面機器人:從字面意思就可以得出結論,這些機器人在地球或其他行星的地面上運行。可以通過將它們的傳動系作為車輪,軌道或腿來進行分類。
3、空中機器人:這些機器人是無人駕駛飛機,例如機器人飛機和直升機。
4、微重力機器人:這些機器人設計用于在低引力環境中運行,例如地球軌道。
5、水下機器人:旨在在水下和較大深度進行操作的機器人。
機器人的控制方法
1、遙控操作
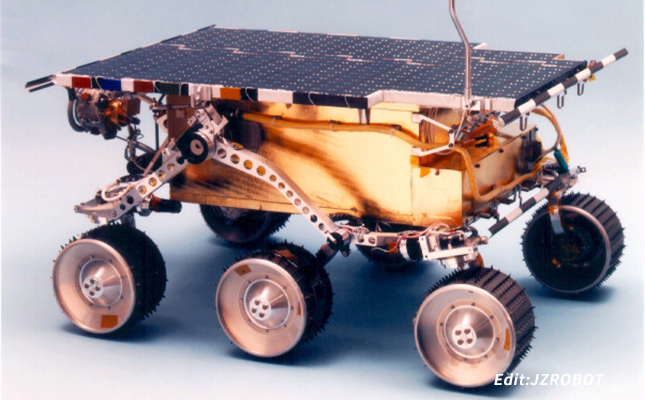
在這種控制方法中,操作員要從遠方控制機器人,以使操作員無法看到機器人在做什么(無線電遙控玩具車不算作遙控操作系統。)操作員和機器人具有某種類型的主副機關系。通常,操作員坐在工作站上,并通過某種界面指導機器人。美國宇航局(NASA)的火星探險家機器人Sojourner是遙控機器人的一個例子。
2、遠程呈現
遠程呈現的目標是通常稱為虛擬現實的虛擬現實,在這種虛擬現實中,操作員具有完整的傳感器反饋,并且感覺就像是機器人一樣。如果操作員轉向某個方向看,則可以看到機器人的視線。如果操作員按下操縱桿使機器人向前移動且車輪打滑,則操作員會聽到并感覺到電動機在變形,同時看不到視覺變化。這為人類提供了更自然的界面,但是在設備方面非常昂貴,并且需要很高的帶寬速率。每個機器人仍然需要一個人。這比傳統的遠程操作要好,但是距離讓一個遠程操作員控制多個機器人還有很長的路要走。
3、自主控制
由計算機控制,具有傳感器反饋,無需人工干預。智能機器人控制需要計算機控制。在這種類型的控制中,計算機可以根據傳感器反饋向機器人發送預編程的位置,甚至在機器人移動時控制機器人的速度和方向。計算機還可以與其他設備通信,以幫助指導機器人完成其任務。
關于機器人的資料,機器人在不同的操作環境下,大致可以分為固定式機器人、地面機器人、空中機器人、微重力機器人、水下機器人等;至于機器人的控制方法,則有遙控操作、遠程呈現、自主控制等。更多關于機器人的資料,可以關注我們來了解哦。