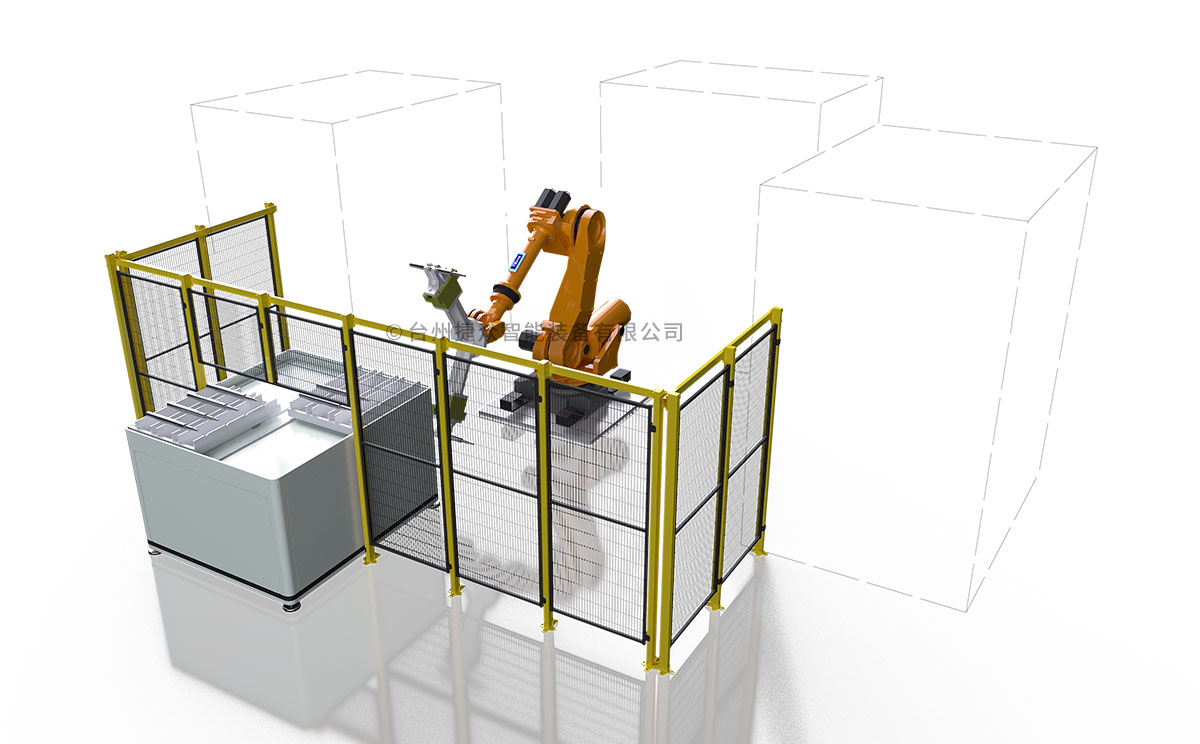
機械手整機調試,夾爪可實現最佳定位
引言:機械手在不同行業的各種制造設備的自動化中發揮了巨大的作用。高速機械手臂可以在短時間內完成繁瑣而重復的任務,提高企業的日常生產能力。
在國內的機械加工中,要實現機床制造過程的完全自動化,并采用集成加工技術,通常會采用自動化機械手,以適用于生產線的上下料、工件翻轉、工件轉序等。然后,機械手從生產制造到實際應用,還需要經過測試,以及現場的整機調試。
為了提高生產效率,越來越多的公司決定將其機床自動化與機械手結合。正確的自動化系統在這里至關重要。機械手的運動調整和適當的抓取技術在這里起著重要的作用。
機械手實時運動調整
即插即用機械手控制系統是一個模塊化系統,適用于大多數機械手品牌,包括ABB、Fanuc和KUKA。其他可以插入的模塊集中在運動學和動力學模型上,以建立一個獨特的機械手指紋,一個整體的編程和仿真環境和一個高動態補償機制,以消除剩余的位置誤差。
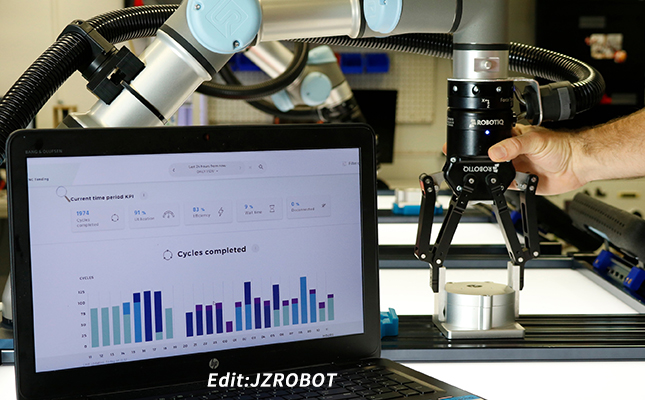
自適應跟蹤系統模塊由兩部分組成:跟蹤系統和比較與路徑自適應模塊。根據具體項目需要,跟蹤系統研究將從尼康計量公司的K系列光學坐標測量機開始。
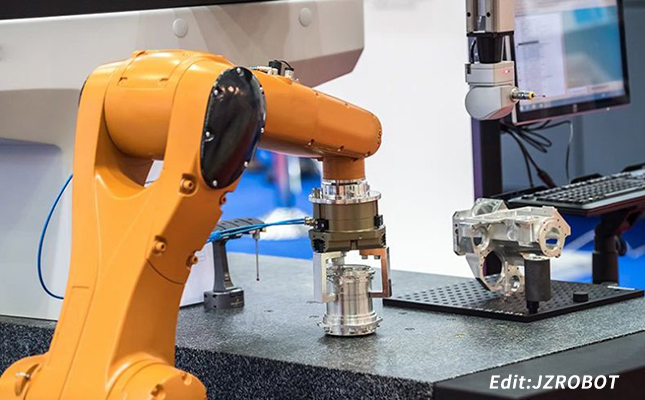
K系列預校準固態攝像機系統由三個線性內置電荷耦合器件(CCD)攝像機組成。當所有攝像機上都有圓柱形透鏡,中間攝像機傾斜90度,光學坐標測量機測量安裝在機器人頭部的紅外發光二極管(LED)的位置。在捕獲時,由于LED位于3個CCD觀測平面相交的位置,因此系統能夠根據平面傾角確定點坐標。該系統提供了以高達1000赫茲的采樣率同時跟蹤多個6自由度LED的方法,以便進行動態測量。
校正自適應模塊不斷地將測量的位置、速度和加速度與部件程序中的相應數據進行比較。然后,基于模型的算法確定何時以及如何調整機器人操作以滿足加工過程所需的精度。尼康計量工程師致力于測量精度、系統延遲和模塊接口,以獲得精確和迅速的機器人運動適應能力。
夾爪可實現精準定位
另一個重要的核心組件是抓取技術。在這里,使用的是Zimmer Group的夾持模塊。例如,每個系統都使用了GD300-C系列的氣動三爪夾爪。三爪夾爪由堅固的外殼組成,外殼由硬質涂層鋁合金制成。它們由帶圓形活塞的雙作用氣缸驅動。其特點是通過同步的主動導向楔形鉤齒輪傳動。這樣可以通過最佳的驅動力偏轉實現較高的抓地力。
三爪夾爪專注于必需品,非常經濟的抓爪方式,以降低生產成本。GD300-C抓爪的T形槽導向確保了強大的力和扭矩吸收。它確保了高剛性,并在緊湊的設計中將其與較長的使用壽命結合在一起。在此,也可以通過特殊的裝料口從側面進行自動裝料。
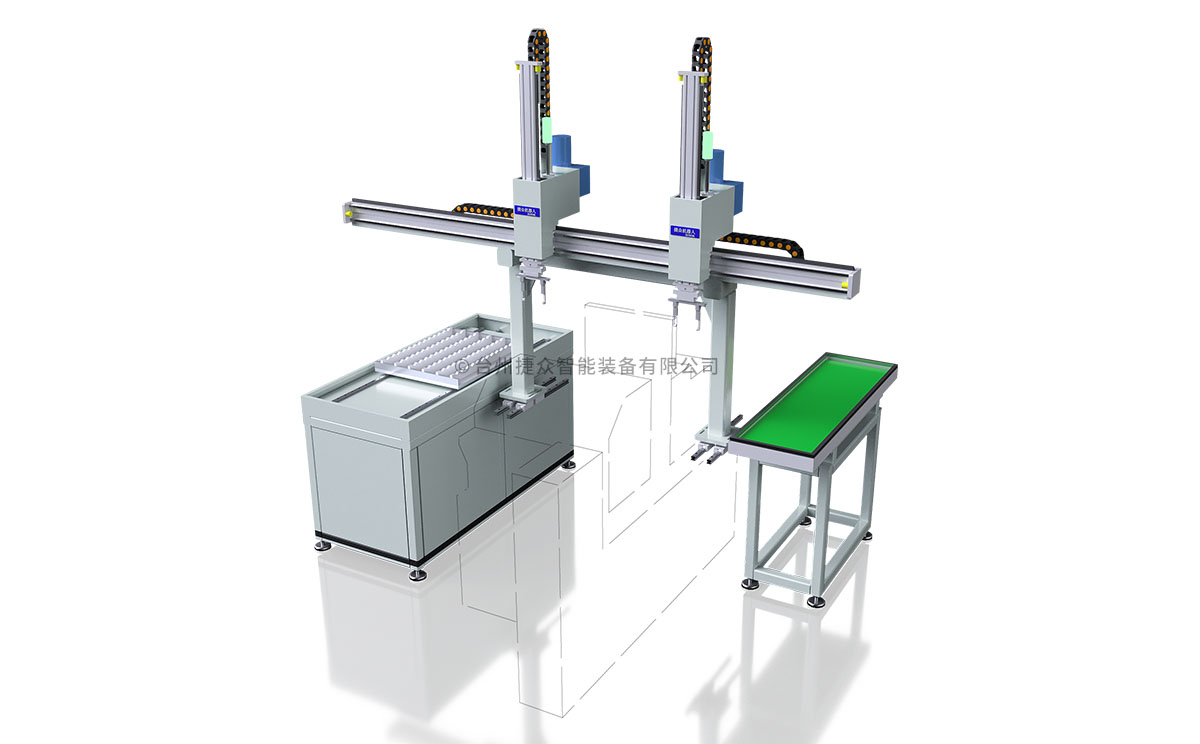
第二面的加工不那么廣泛,因此花費的時間要少得多,并且在此單獨進行。由于第一臺機器對于系統循環至關重要,因此必須在加工結束并立即插入四個新毛坯后立即從中取出四個已加工的工件。帶有四個工件夾的組合式存放和車削工位用于半成品的中間存儲。在這里,機械手將零件放回原處,然后再次撿起來,以裝載第二臺機器。
我們公司多年來一直以創新的機械手解決方案服務于各個行業。因此,我們了解企業對可靠的制造自動化的需求,以有效地簡化其流程。無論您的設備應用是什么,我們公司都可以生產出高質量和穩定的自動化機械手設備,可以應付現代制造業的挑戰。請立即聯系我們,獲取您理想的機械手方案。