桁架機械手原理,桁架機械手發展趨勢
發布時間:2018-04-13 13:54:54 瀏覽:次
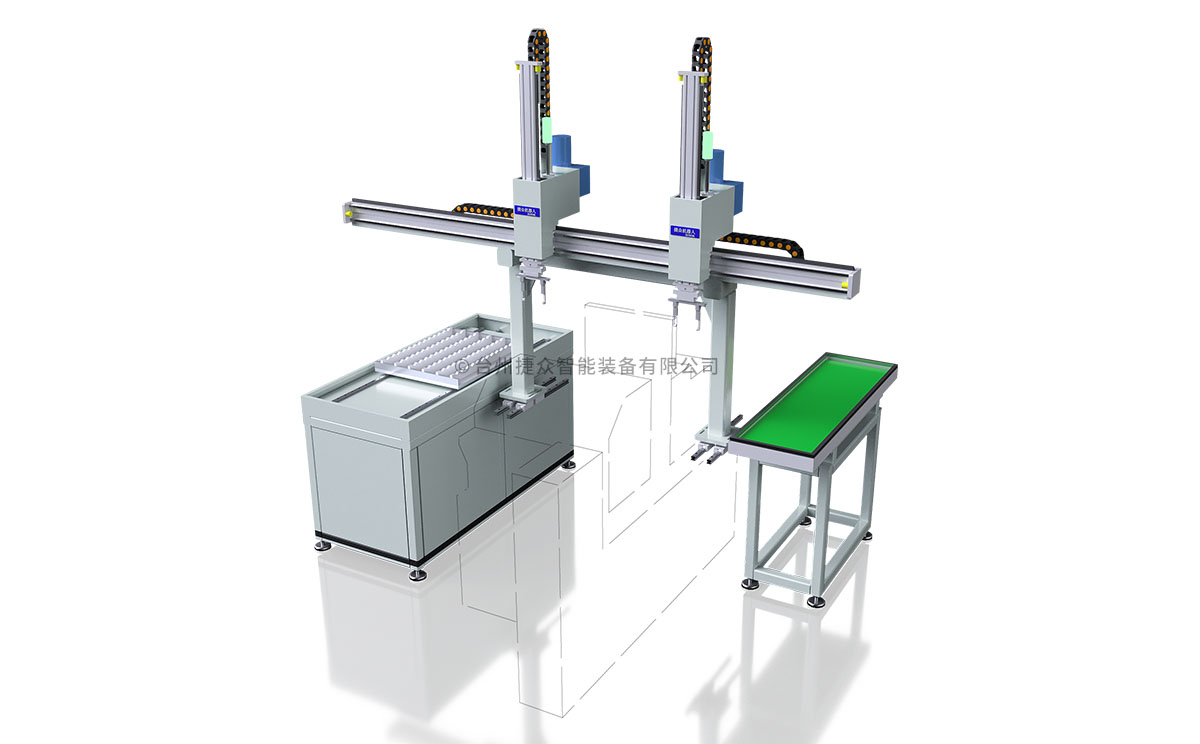
引言:桁架機械手是一種建立在直角X,Y,Z三坐標系統基礎上,對工件進行工位調整,或實現工件的軌跡運動等功能的全自動工業設備。其控制核心通過工業控制器(如:PLC,運動控制,單片機等)實現。通過控制器對各種輸入(各種傳感器,按鈕等)信號的分析處理,做出一定的邏輯判斷后,對各個輸出元件(繼電器,電機驅動器,指示燈等)下達執行命令,完成X,Y,Z三軸之間的聯合運動,以此實現一整套的全自動作業流程。
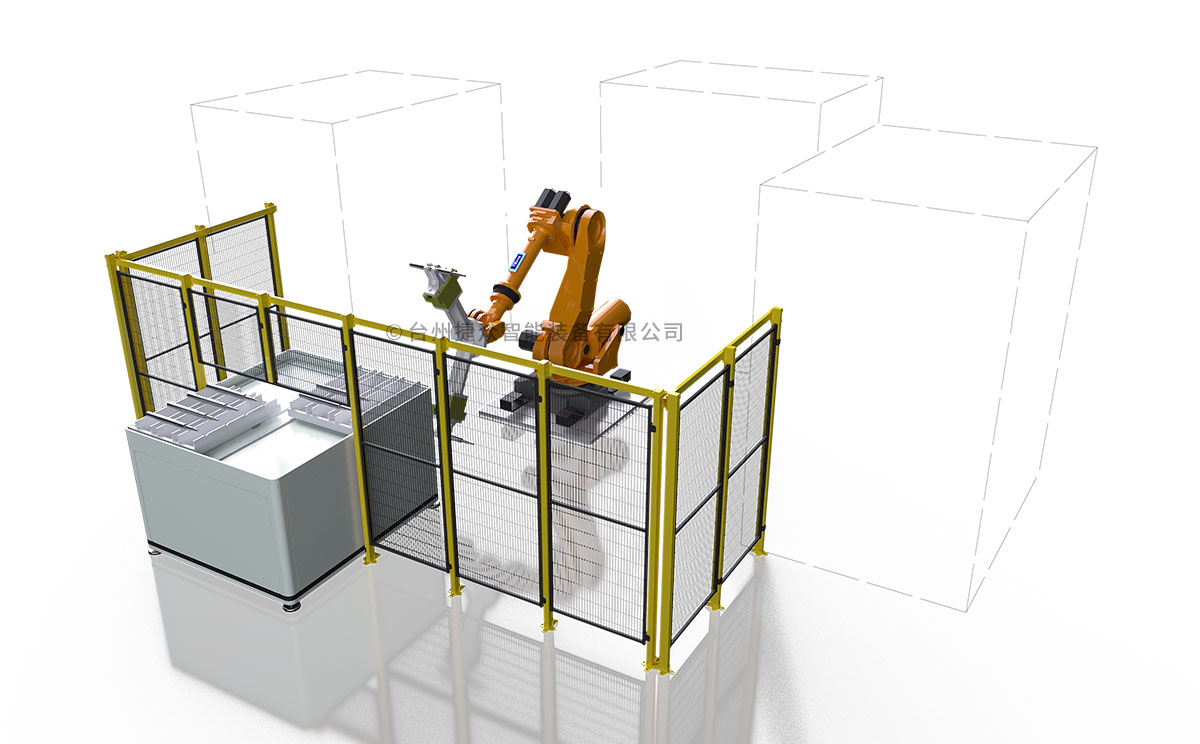
現在的桁架機械手比傳統的機械臂在現場檢查和修復方面具有許多潛在的優勢。這種新的機器人就是基于X,Y,Z三軸的桁架機械手,結合機械手的靈巧能力及桁架結構特性的概念。通過用直線模組代替桁架中的某些固定長度構件,可以改變結構的整體形狀。通過協調這些模組中的滑塊的運動,能使桁架機械手執行與產品上下料的相關工作,包括搬運、上下料、夾物、持具等等。
在對桁架機械手的進一步研究中我們發現,可以通過對其進行多自由度的設計,再配合機器視覺的作用,就能對現場物件進行檢測、識別、搬運,甚至過障礙等一些普通機械手根本不可能完成的任務和動作。這種新型的多自由度機器人或許在不久的將來就能得到廣泛應用,因為此類智能化的機器人在國外已經有案例,并且實際的得到了應用,國內工業的不斷發展,也將會把工業帶入智能化時代。