數控車床上下料機械手的工作過程
引言:過去,在許多工廠的生產流水線上,數控車床工件的裝卸大多都是由員工進行的,這樣的勞動強度會比較大,生產效率也會比較低。為了提升生產效率,降低人工成本,并使生產流水線發展成一個柔性制造系統,便使用了機器人技術,設計出了一臺上下料機械手來替代員工工作。本文將以數控車床上下料機械手來進行相關內容的介紹。
機械手是一種有著抓取和移動物件功能的自動化設備,模擬了人手和臂來接連完成多個動作,按照固定的程序來替代員工進行高度重復且枯燥乏味的工作,以減輕員工的勞動強度,提升工廠的生產效率。
在機械制造業中,它可以替代員工做各種工作,如零部件的組裝、工件的裝卸和搬運等,尤其是在機床上的使用更加的普遍,如數控車床和數控外圓磨床等。它可以自動地為機床抓取工件和裝卸工件,以實現機床加工過程的自動化。下面便為大家介紹一下數控車床上下料機械手的工作過程。

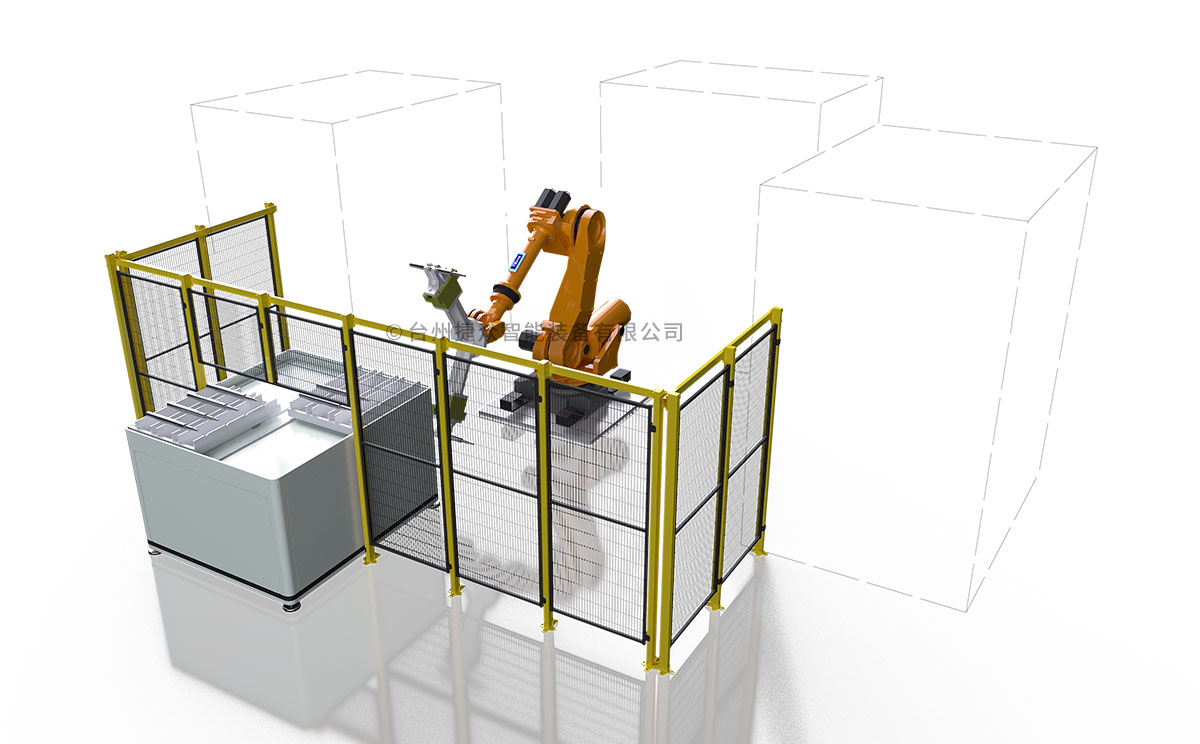
數控車床上下料機械手
數控車床上下料機械手的工作過程
數控車床上下料機械手指的是對數控車床進行自動上下料、自動搬運工件到料倉等持續性動作的自動化設備。上下料機械手與數控車床的結合可以形成自動化生產流水線,實現對車床上料、加工、下料的自動化和無人化。
1、上料過程:上下料機械手的初始位置設置在待加工工件料倉的上方,手爪是處于打開的狀態。當車床需要上料的時候,便向上下料機械手發送信號,沿著Z軸向下降,使手爪能抓取到工件,抓取到工件后,沿著Z軸再向上升至一定高度,然后再沿著X軸方向移動到車床的正上方,沿著Z軸向下降,將工件裝入卡盤中,之后卡盤便會夾緊工件,而上下料機械手會沿著Z軸向上升至車床防護罩的上方,沿著X軸移動到等待位置,等待車床發出下料信號。
2、下料過程:當加工結束后,便向上下料機械手發出下料信號,上下料機械手會沿著X軸移動到車床的正上方,沿著Z軸向下降,使手爪能抓取到工件,抓取到工件后,卡盤會松開工件,而上下料機械手會沿著Z軸向上升至合適的高度,然后沿著X軸方向移動到已加工工件料倉的上方,沿著Z軸向下降,將工件放到放料位置,放料完成后,便沿著Z軸向上升,再進入到下一個上料過程。
數控車床上下料機械手的特點
1、靈活度高:它的特點之一便是靈活度高。在工作的過程中,其執行機構會通過升降、伸縮以及旋轉等運動方式來抓取區域中任意位置的工件,執行機構的運動通常也被叫做執行機構的自由度。自由度是上下料機械手設計的主要參數之一,自由度越多其靈活度也就越高,通常上下料機械手的自由度有兩個到三個左右。

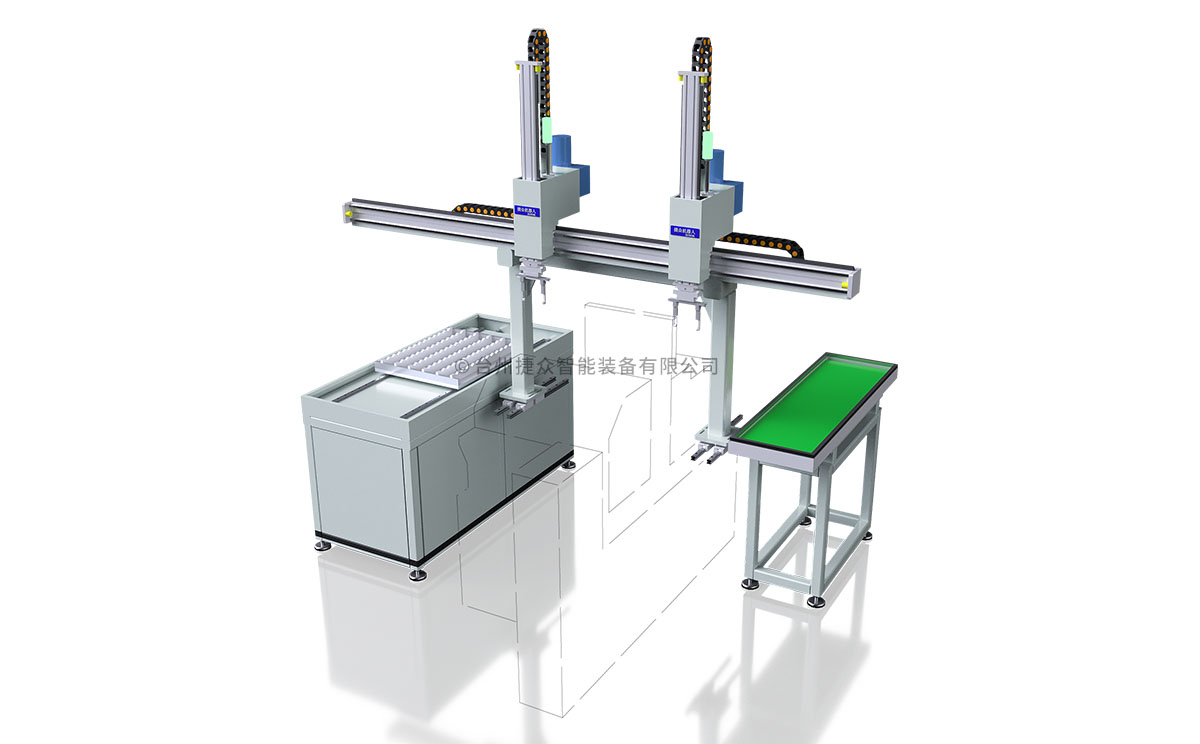
數控車床上下料機械手
2、使用了單獨的控制模塊:它主要實現數控車床加工過程的自動化,通常采用了集成加工技術,可以對盤類、軸類以及板類等各種工件的自動裝卸、翻轉以及轉序等,并且使用了單獨的控制模塊,不需要依靠車床上的控制器來進行控制,使用的時候也不會影響到車床的運轉。
3、運動范圍大:為了適應上下料工作或者不同需求的工廠,這種上下料機械手的手臂會比較長,其運動范圍也會比較大,從而可以在高效率的情況下實現大范圍的移動,進一步提升了它的實用性,在多次的移動過程中也不會影響到它的定位精度。
本文介紹了數控車床上下料機械手的工作過程,以及它具備靈活性高、擁有單獨的控制模塊、運動范圍大的特點。同時,還了解到數控車床上下料機械手是對數控車床進行自動上下料、自動搬運工件到料倉等持續性動作的自動化設備。關注捷眾機器人,了解更多關于數控車床上下料機械手的知識。