工業機器人的手部是什么,通常都有哪些特點
引言:工業機器人是一種普遍用于制造行業的機器設備,通常由機械系統、控制系統以及驅動系統等部分組成,其中的機械系統又由機座、手臂、手腕以及末端執行器這幾個部分組成,而所謂的末端執行器,也就是工業機器人的手部。本文將以工業機器人的手部來進行相關內容的介紹。
工業機器人就像一個多才多藝的多功能技術人員,通過可變的運動來移動物件或者工具,以完成各種各樣的工作。與其他機器進行通信以及對感官輸入做出回應的能力是它的重要屬性,這些功能可以使它在本質上更加通用。它涉及到了多個軸的協調控制,并使用專用的數字計算機來作為控制器。
由于它們可以通過編寫程序來完成危險或者重復性的工作,因此,工業機器人逐漸被用于各個行業當中。在各個行業的應用中,它可以利用手部來操作執行過程中的工具或者正在執行過程中的工件。下面我們將簡單介紹一下工業機器人的手部,以及它的特點。

工業機器人手部
工業機器人的手部是什么
工業機器人的手部是安裝在機器人手腕上的一個部件,所要完成的工作大多都是通過手部來進行完成的,通常會用它來抓取物件或者操作工具,按照規定的動作程序來完成指定的工作,其抓緊和松開的動作全部都是自動完成的。
人的手是具有很多關節的多個手指的手,可以完成很多比較復雜的工作,如制作物件、使用工具以及做各種各樣的手勢等。在工業機器人的手部設計中,由于機構和控制系統方面的局限,難以設計出像人手這樣的通用裝置;另外,工業機器人的工作要求對大多數工作現場都是有局限的,因此其手部的設計主要是針對指定的工作對象而設計的。
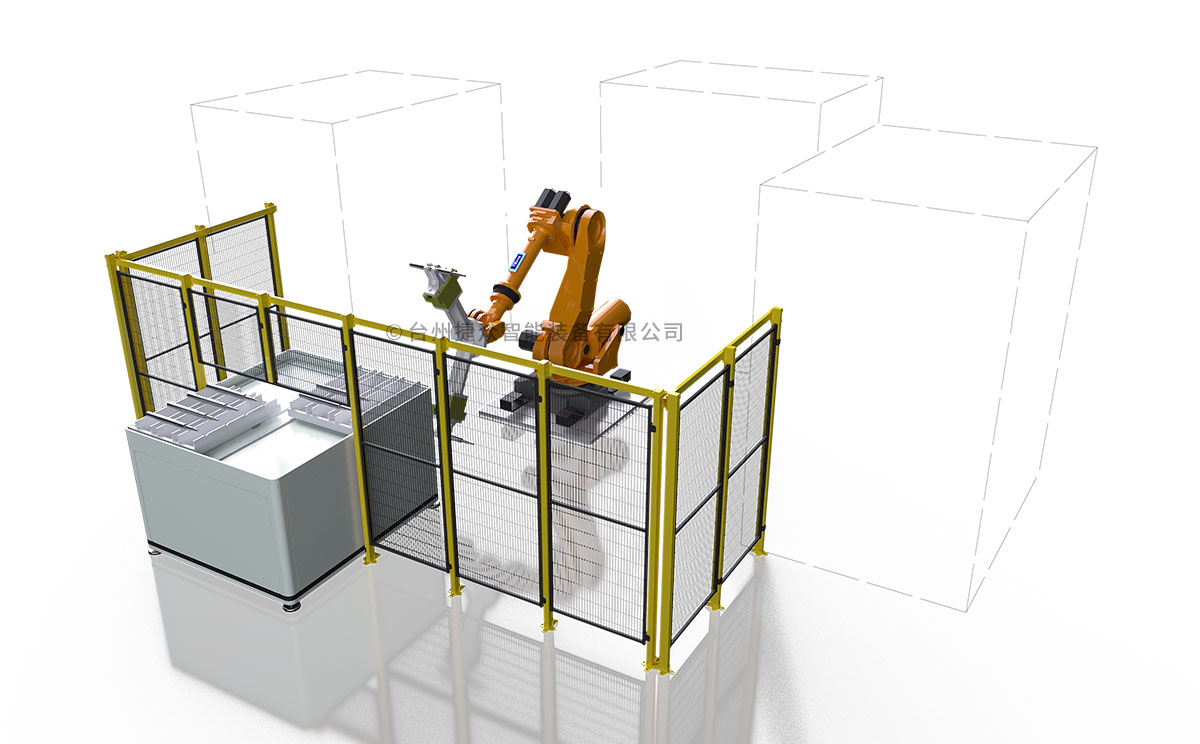
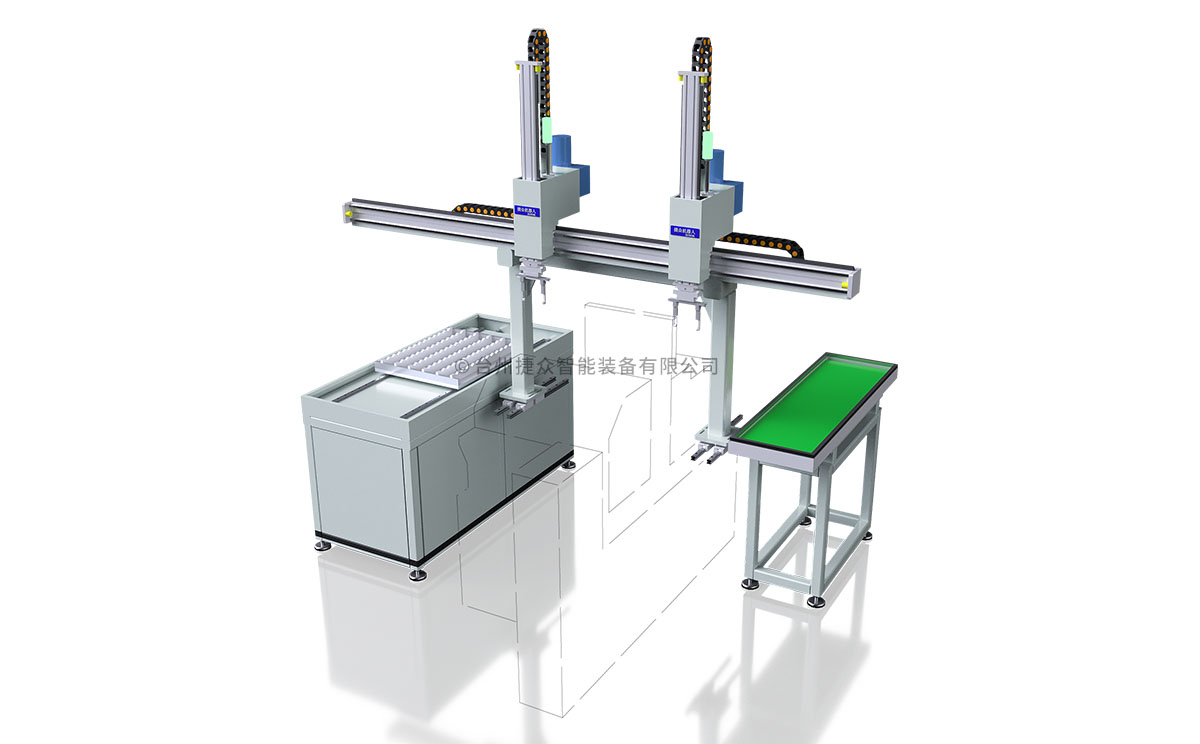
它的手部可以像人手那般有手指,也可以是沒有手指的手;可以是類似于人的手爪,也可以是進行專業工作的工具,如碼垛機器人使用的手部是可以用來抓取和移動箱子的,這些手部通常是氣動夾具或者真空吸盤系統。當然,并非所有的工作都會需要機器人來抓取物件,在焊接工作中,機器人的手腕會安裝焊槍來作為手部,合適的手部可以讓機器人更好地完成焊接工作。
工業機器人手部的特點
1、有各種手部形式:隨之技術的發展,它的手部出現了各種形式,通常有夾鉗式、吸附式或者專用和通用手部等,如夾鉗式,它是比較普遍的一種手部形式,類似于人的手爪,通常用于裝配工作上;吸附式手部,依靠著吸附力來進行抓取物體,適合用在易碎物體;專用式,它是一種進行專業工作的工具,如焊槍、噴漆槍等;通用式,它和人的手比較相似,有兩個或者五個手指,可以完成比較復雜的操作。

工業機器人手部
2、可以拆換:手部和手腕相互連接的地方是有機械接口的,根據不同的抓取對象,其手部的結構也會有些許不同。通常一臺工業機器人會配備多個手部裝置或者工具,因此,當抓取對象發生變化的時候,便可以進行拆卸和更換手部。
3、通用性不好:它的手部一般是一個專用裝置,一種手部通常只能用來抓取一種或者多種在尺寸、重量以及形狀等方面比較相似的物體,一種工具也只能用來進行一種工作任務,所以其手部的通用性不是很好。
瀏覽以上文章我們可以了解到工業機器人的手部是一種裝置,主要安裝在機器人的手腕上,具有模擬人手動作的功能。每一個工業機器人都是需要手部的,如果沒有手部,那么工業機器人就沒有辦法發揮出自己的用處。關注我們,了解更多工業機器人手部的知識。