機械手自由度是什么,三自由度機械手介紹
引言:機械手自由度是什么,自由度機械手與我們經常能在網上或者生活中聽到更多的關節機械手一樣嗎?帶著這些問題,我們來看看下面這篇文章吧,或許會有不少的收獲哦。
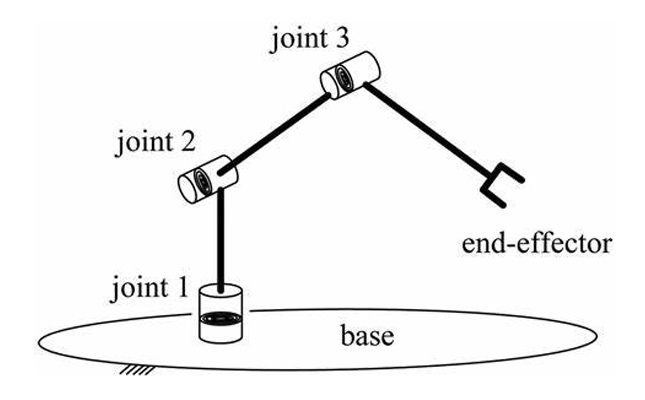
機械手自由度,是指傳送機構機械手的運動靈活性,通常把傳送機構的運動稱為傳送機構的自由度。機械手的每一個自由度是由其操作機的獨立驅動關節來實現的。所以在應用中,關節和自由度在表達機械手的運動靈活性方面是意義相通的。

自由度是指機械手各運動部件在三維空間坐標軸上所具有的獨立運動數。
1、一個自由度
(1)一個直線運動,構成直線。
(2)一個旋轉運動,構成曲線。
2、兩個自由度
(1)兩個直線運動,構成平面。
(2)一個直線運動加一個在直線運動所在平面內的旋轉運動,構成平面。
(3)一個直線運動加一個不在直線運動所在平面內的旋轉運動,構成圓柱曲面。
3、三個自由度
(1)三個直線運動,構成立方體。
(2)兩個直線運動和一個旋轉運動,構成圓柱體。
(3)一個直線運動和兩個旋轉運動構成球體。
(4)三個旋轉運動,構成球體。
要達到空間任意一點,原則上需要3個運動軸,而把一件工具送到相對于工件的一定位置時又需要3個運動軸。因此,一臺通用機械手能夠達到空間的任意點,并將工具送到相對于工件的任意位置,最低限度需要6個運動軸。其中位置自由度3個,姿勢自由度3個。
三自由度機械手
三自由度機械手是一種能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。特點是可以通過編程來完成各種預期的作業,構造和性能上兼有人和機械手機器各自的優點。
三自由度機械手主要由執行機構、驅動機構和控制系統三大部分組成。手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動機構,使手部完成各種轉動(擺動)、移動或復合運動來實現規定的動作,改變被抓持物件的位置和姿勢。控制系統是通過對機械手每個自由度的電機的控制,來完成特定動作。同時接收傳感器反饋的信息,形成穩定的閉環控制。控制系統的核心通常是由單片機或dsp等微控制芯片構成,通過對其編程實現所要功能。
通過對機械手自由度的了解之后,我們知道機械手自由度其實與機械手的關節數是意義相通的。那么,三自由度機械手也就是三關節式機械手,其在三維空間坐標軸上具有三個獨立的運動數。目前應用較多的機械手有二自由度機械手和三自由度機械手。在機械手自由度與自由度機械手上還有不清楚的地方,可以關注我們的公眾號,了解更多機械手的相關知識。