氣動機械手設(shè)計,實現(xiàn)更高效的自動化運行
引言:氣動機械手設(shè)計是機械手應(yīng)用氣動技術(shù)與氣動元件最好的表現(xiàn),它的設(shè)計思路和設(shè)計原理都需要有非常縝密的邏輯和堅實的理論知識。下面,我們帶大家來了解關(guān)于氣動機械手設(shè)計的一部分內(nèi)容。
氣動機械手實際上是機械手采用了氣動元件作為機械零部件,再由氣壓傳動來進行能量傳遞,目的是為了使機械手能夠具備更有力的扭矩和更高效的運行速度。同時由于氣壓傳動動作迅速、反應(yīng)快、調(diào)節(jié)方便,能夠更好地利用氣壓信號來實現(xiàn)自動控制。機械手的設(shè)計離不開對產(chǎn)品加工需求的條件,無論是應(yīng)用在數(shù)控機床還是其他行業(yè),它都需要通過程序設(shè)定來實現(xiàn)加工產(chǎn)品的功能,已達到最大的自動化程度。
氣動機械手設(shè)計
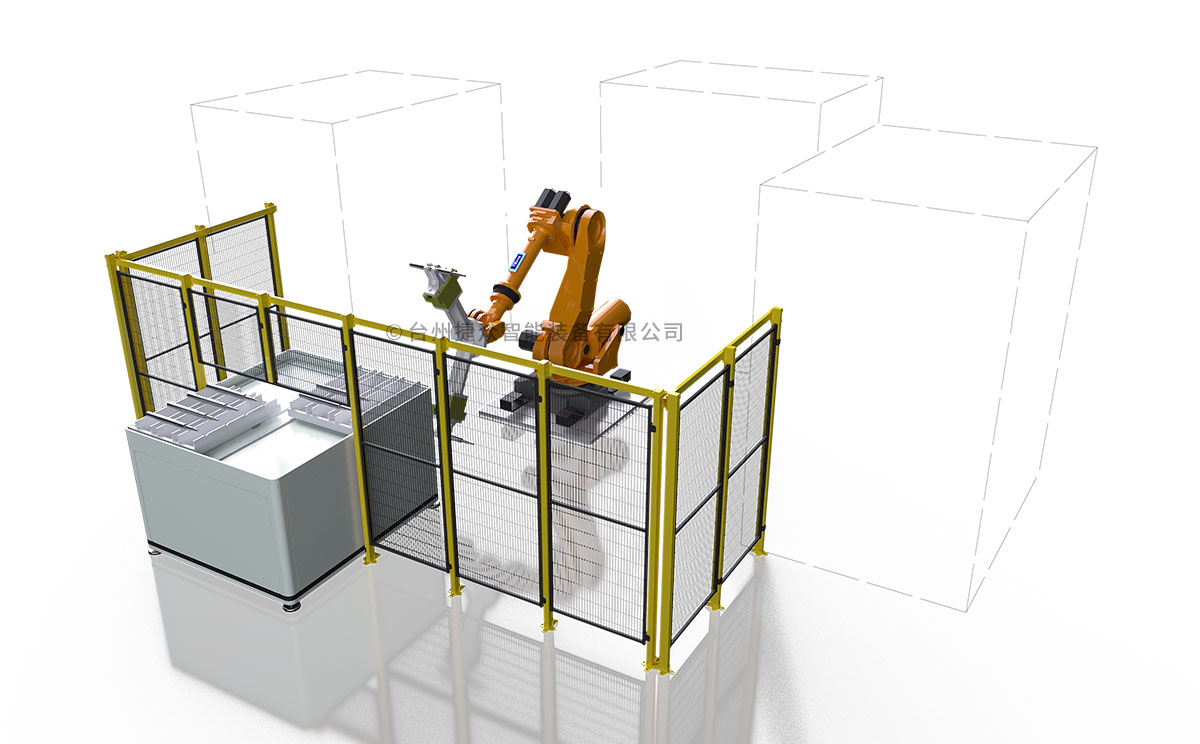
氣動機械手主要由執(zhí)行機構(gòu)、驅(qū)動系統(tǒng)、控制系統(tǒng)以及位置檢測裝置等所組成。在PLC(可編程序控制器簡稱PLC,由于具有功能強、可編程、智能化等特點已成為工業(yè)控制領(lǐng)域中最主要的自動化裝置之一)程序控制的條件下,采用氣壓傳動方式,來實現(xiàn)執(zhí)行機構(gòu)的相應(yīng)部位發(fā)生規(guī)定要求的,有順序,有運動軌跡,有一定速度和時間的動作。同時按其控制系統(tǒng)的信息對執(zhí)行機構(gòu)發(fā)出指令,必要時可對氣動機械手的動作進行監(jiān)視,當動作有錯誤或發(fā)生故障時即發(fā)出報警信號。位置檢測裝置隨時將執(zhí)行機構(gòu)的實際位置反饋給控制系統(tǒng),并與設(shè)定的位置進行比較,然后通過控制系統(tǒng)進行調(diào)整,從而使執(zhí)行機構(gòu)以一定的精度達到設(shè)定位置。
氣動機械手是由手部、手腕、手臂、立柱和機座組成,手部主要是與物件接觸的部分,與普通的機械手不同的是氣動機械手手部使用的是氣動手指缸,能搬運一些較大型的材料。手腕是連接手臂來調(diào)整被抓取物件的姿勢。手臂是帶動手指去抓取物件也是控制將物品抓取到或者搬運到指定位置。立柱是支撐起手臂的部件,手臂的升降和回轉(zhuǎn)都與它有著密切的聯(lián)系。機座是用來連接機器的一個作用,比如將氣動機械手連接在無心磨床上可以使生產(chǎn)進一步的自動化。
在制造業(yè)中只要和生產(chǎn)相關(guān)的活動都不可忽視,質(zhì)量和口碑更為重要,我們關(guān)于氣動機械手設(shè)計有多年的經(jīng)驗,是一家具備自主研發(fā)能力的生產(chǎn)廠家,可以關(guān)注我們的官方網(wǎng)站和微信公眾號,了解關(guān)于氣動機械手設(shè)計的更多內(nèi)容。